パッケージの入れ方が分かんなくてもSublime Text単体でコンパイルを済ませたい!
今回はSublime TextでTeXのコンパイルをしたいけど, パッケージインストールに挫折した人とか,既にw32texがPCに入ってる人のための内容のつもりです.
なんでこうなった
テキストエディタはsublime Textを使ってるけどlatex?のパッケージ入れ方わかんないし,コマンドプロンプトでw32texのplatexを呼んでればいいやと思ってここ数年texをさわさわしてたけど, つい最近sublime textにbuild systemてゆう便利な機能があってその内容も自分で書けるって知ったのが発端です.
結論
このようにしとけばわざわざコマンドプロンプトを開く必要もなくSublime Textのみで完結させることが可能になる.
しかし,texなどの環境はどのpcに入っているわけでもないので出かけ先でtexを使用したい場合はCloud LaTeXやUSBにTeX環境を構築しておくことになる.
その場合,環境変数は指定しないとだし,パスも毎回変えるのは面倒. そこで,usbに構築してあるドライブレターが変わってもフレキシブルに対応できるように中身を書き換えちゃおう.
準備段階
本稿では以下のソフトウェアが必要です.
※adobeだとコンパイルの度に閉じる面倒があるので,SumatraPDFを使うことにする.
本稿の3ステップ
詳しいやり方
説明が面倒なので,どのPCにもw32tex等が入ってることにする.
だから今回はPDF表示の部分だけバッチファイルで補う
ここで,
バッチファイル(Batch File)とは、MS-DOS、OS/2、Windowsでのコマンドプロンプト(シェル)に行わせたい命令列をテキストファイルに記述したもの。
らしい.すなわちwindows向けかもしれない.
buildsystemの作成
コンパイルした後PDFを開きたいけどPDFviewerがUSBに入ってるとき,USBを刺した時にドライブレターが決まるので,この部分はbatファイルで補うことにする.(ワンチャンbuildsystemの変数だけで行けそうな気もする.
{ "cmd": [ "platex","$file","-interaction=nonstopmode","&", "dvipdfm","$file_base_name","&", "${packages}\\User\\platex.bat","$file_base_name.pdf" ], "shell":true }
5行目でbatファイルに対して,dvipdfmxで作成されたPDFファイル名を渡してる.
また5行目からもわかるようにbatファイルは sublime-buildファイルの保存先と同じ場所である,package/User/に保存することにする.名前は適当.
なお,この文章中で,selectorの設定を行うと*.texに対してはbuild sytemが自動でplatexに設定されるようにできたりするらしい.ぜひ導入するべき.
platex.batの作成
PDFを起動するだけ
@echo off set PATH=%~d0\usr\SumatraPDF;%PATH% start SumatraPDF.exe %1 exit /b 0
batファイルの書き方はよくわかんないので不要な文などが多くあるらしい.(動くからいい的な
実行方法
sublimeTextでTeXを開く,toolのbuildsystemをplatexに指定して,ctrl + B
何もエラーがなければ,SumatraPDFが起動し,生成されたPDFファイルが表示される.
まとめ
sublime Textのbuild sytem機能を用いてLaTeXのコンパイル,PDF化,PDFの表示ができるようになりました.今までのmakefileより圧倒的成長✌ やってること的にはEmEditorのコンパイル機能と変わらない気がするけど()
build systemはコマンドプロンプトを省略できるのは細かいけど応用が利きそうです.
newラインセンサ回路
こんばんは.
世界大会の枠数は各カテゴリ1枠とのことで,残念ながらCat-Potは世界大会に出場できなくなってしまいました.準優勝のSSSには頑張ってもらいたいです!!
とは言ってもラインセンサを新しく作り直そうと思っていて回路も設計しちゃってめちゃくちゃ乗り気だった昨日までの私.
むなしいので設計だけしてブレッドボードで試してすらいませんがラインセンサの回路を公開します.
使う人はいないと思いますので参考程度にどうぞ.
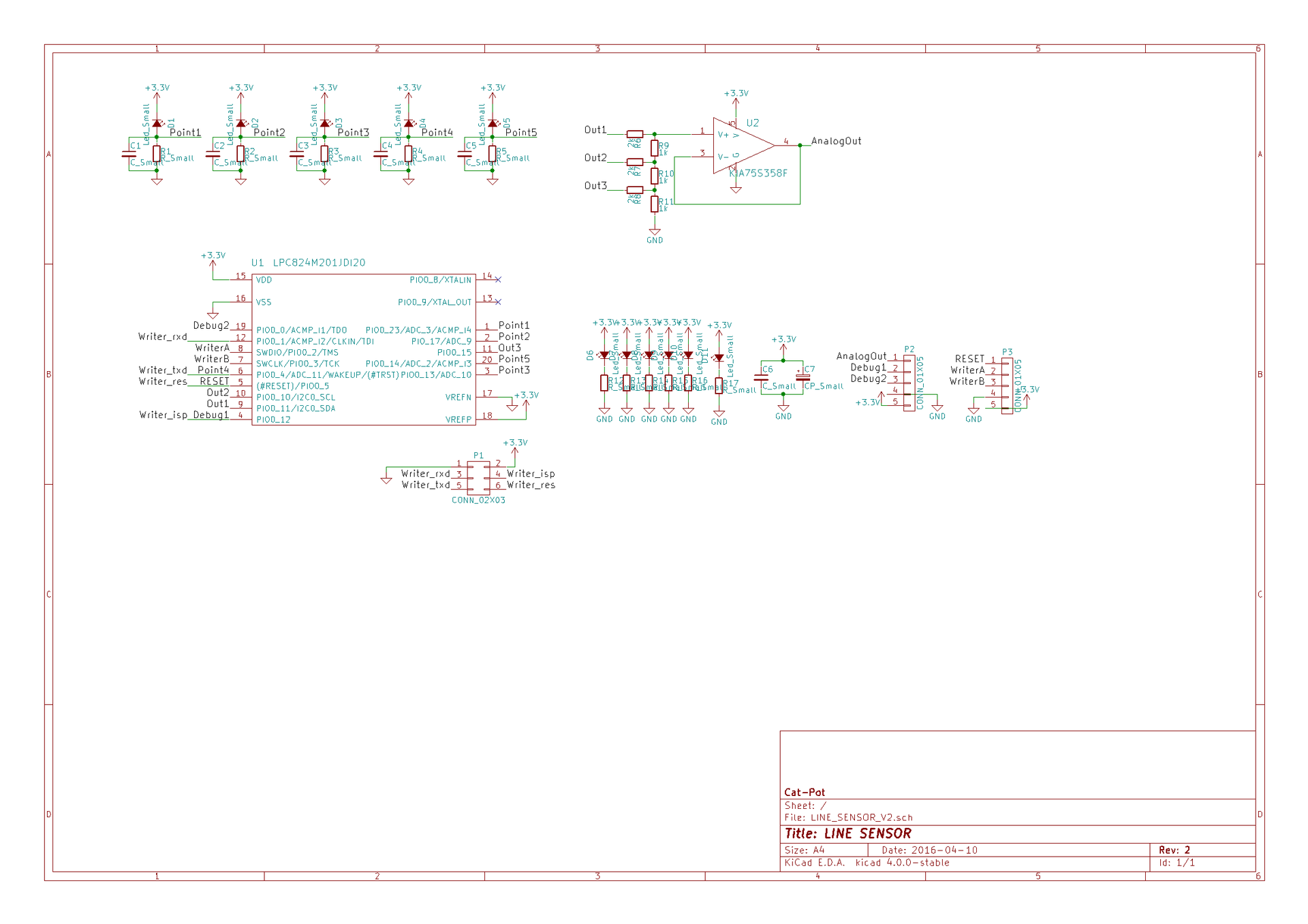
一つ一つアナログ値としてマイコンで読ませます.
そして,ラダー型DACを用いて,出力を8段階の任意のアナログ出力をします.
これをメイン側のマイコンで読んでラインを処理しようという考えでした.
デバッグ用に2ピンあるのは前回の自己保持回路との互換性を保つためです.回路が使い物にならなかった場合はプログラムを書き換えて自己保持回路として利用することもできます.(マイコン積んでるから当たり前ですね.)
動画をいくつか公開しています.動画のマカオの動きをみてチームの戦略に役立ててください.
Cat-Potの秘密
CatPotの(りゅな)でないほうのプログラム担当の(lilac)です.
ロボカップジャパンサッカーオープン2016のときに使用したプログラムを公開しました.
mbedUserでプログラムが見れるorそれでいい方は
エディタ等で見たい方は以下のURLにアクセスしてダウンロードをしてみてください.
こちらにはおまけのIRのフォーマットも上がっています. リンク
公開したのでプログラムを書いているロボカッパーの方でCat-Potの動きがどのようになっているのか,
どのようなコードになっているのか気になる人はぜひともご覧ください.
ちなみにあんまりコメント書いてないんでわかりにくいです.申し訳ありません.
そこは変数名でわかりやすくしようと努力したつもりなんでご勘弁願います.
公開したプログラムには2014年のジャパンオープンのchronograph(先輩のチーム)のプログラムを
参考にしています.オムニの出力制御やコンパスの値をモーターの出力に反映するためのPID制御などが該当します.
残りはほとんど独学です.しかし同じ学校の後輩のInputやnncbotの練習風景を見て参考にした点もあり,
彼らがいてこそのプログラムです.
ファイルのなかに,数字がずらりとならんでいるファイルがありますが,手入力をしたわけではなくエクセルを用いて
コピペしました.
プログラムを読んでハード面で分からないことがあったらハード担当の(りゅな)君のツイッターのアカウントにつぶやけば
きっと何か教えてくれると思います.
続きを読むCat-Pot技術公開1:ラインセンサ回路
大会まであと1日,3月25日になりました.今日は調整日です.
大会の開催に伴って大会中の技術交流のネタのひとつとして今年作ったラインセンサの回路図を公開します.
この回路はつい廃オカダくん(@OkadaTechnology)との共同開発になります.あっちが公開しようと言うので同じ日に公開することになりました.
経緯を簡単に説明します.
オカダ:マイコン処理重なりすぎてライン処理入る前に白線通り過ぎるんですけどーーーー(;´д`)
私:別マイコンで処理させればよくね????
オカダ:ICでなんとかならん??
私:ほぇ~~~~
(数分経過)
オカダ:サイリスタで読むまでONにして読んだらOFFで解放すればいいんじゃ!
私:サイリスタって何ぞ.てかそれ自己保持させればいいんじゃね?
(オカダによるサイリスタの説明が入る)
私:へーきっついな!
(数日経過)
私:自己保持させるならOR回路で組めるくね??簡単やん!
オカダ:ためします!!!
数日経過・・・・その後いろいろあり
私,オカダ:動いた!!!強そう!!!
てな感じでラインセンサ回路ができました.回路図はこちら.
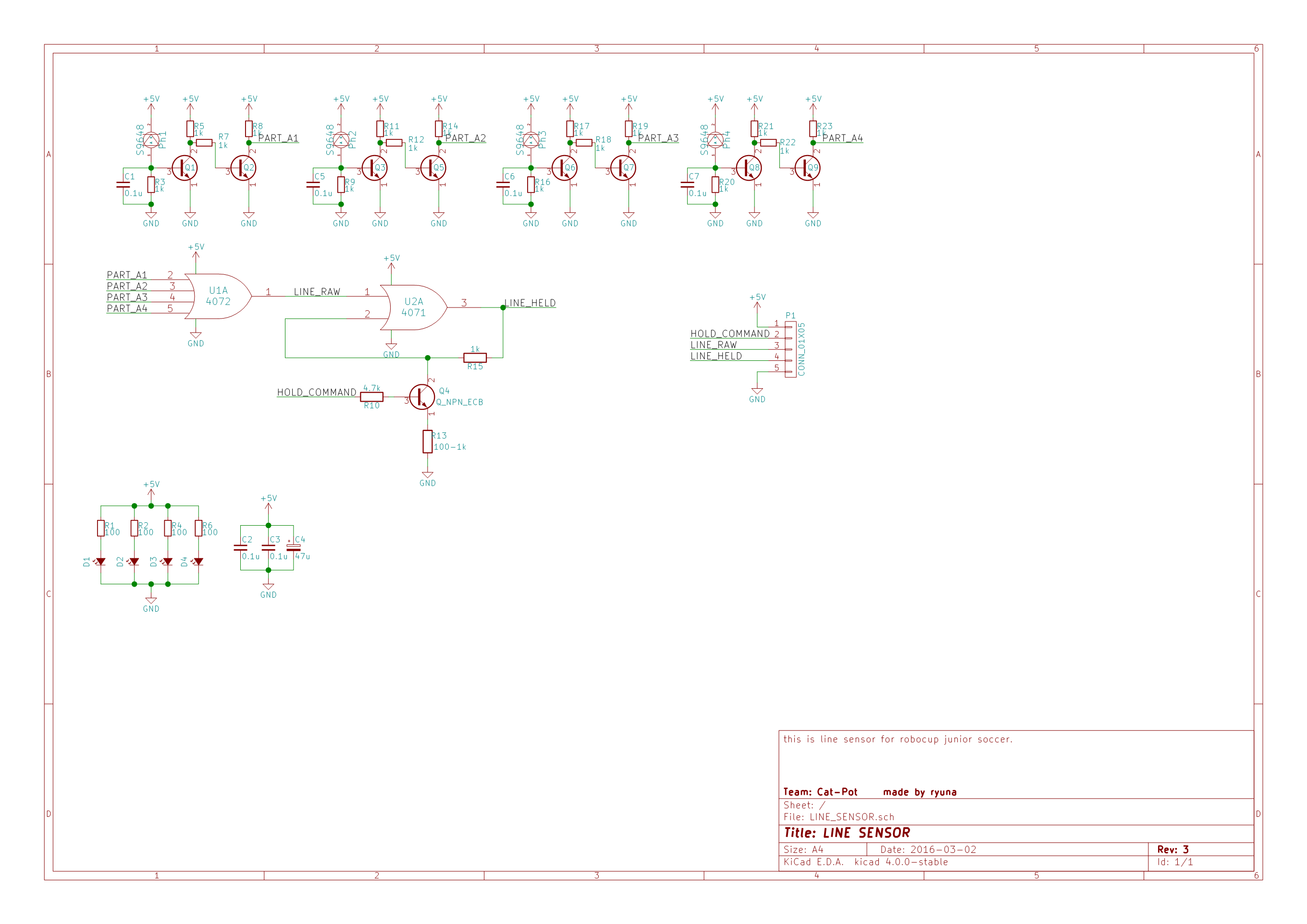
主な機能を以下にまとめます.
・複数個の受光素子をORICで統合→方向ごとに管理が可能に
・立ち上がりを保持(センサの出力を保持)
・信号ピンにより保持のON,OFF機能の搭載
・今まで通りの検知も可能なように保持前のデータも出力
なお,論理演算をするために信号がHigh,Lowになります.ADCによる処理が出来なくなるので閾値には気を付けましょう.
目玉はやはり自己保持回路部ですね.生の値(RawData)の後にOR回路と抵抗とトランジスタだけで実装ができる点でマイコンに比べ優位でしょうか.まぁ値の調整面倒ですが.
センサのところは1方向分になるのでうちの回路の場合この部分が3つあります.新JISに反抗するために4072を使ってますが,実際の回路は4075で構成して,数がちょうど合うようにしています.
さてさて,肝心の保持することによる利点ですが,
・自己保持ON→読み取り→自己保持OFF→(wait)→自己保持ON→以下ループ
とすれば,前回のチェックから今のチェックの間でラインを読んだことがわかります.このため検知漏れは確実になくなることになります.
・また,保持を解除していてもただのORで組んでいるだけなのでRawDataもOR回路の出力になります.このため保持をしていなくても検知が可能です.これは通常の利用方法と同じでしょうかね.
最後に,この回路の応用例を挙げます.
まず,ロボットはボールに対して回り込みおよび追いかける動作をしていることとします.
この状態の時ラインを読む可能性があるのはボールのある方向のみです.そのためラインを踏む可能性のある方向のみ(ボールのある方向,あるいはロボットの進む向き)の自己保持をONにします.
この状態で通常通り回り込み動作をさせます.
ボールのある方向でラインを踏んでしまったとしましょう.
そうすると,回路は当然値を保持します.なので今度はRawDataを用いてラインの処理を行います.
RawDataが白線を検知しなくなるまでロボット動かします.
ボールの位置が変わるまで保持を継続し変わったら保持を解除すればライン間際で往復することを防ぐことが考えられます.
簡単ですが応用的な使い方は以上です.
まとめます.
ラインセンサはマイコンで処理してもプログラム次第でなんでもやりようがあるし,いいと思う.
でも,ロジックで実装してみたら案外簡単にできるかもしれない.
固定観念にとらわれず,柔軟な発想で新しい回路を開発して下さい!!!
コメント受け付けます!質問もどうぞ!!ツイッターアカウントは@ryuna_roboです.こちらの方が対応早いです.(文章はひどいですが)
コミュ障ですが皆さんと交流したいので絡んでください.では大会頑張りましょう!!
全国大会出場します!!!
お久しぶりです.
試験やら大会やら大会やらで更新が空いてしまいました.
RCJSのオープンB全国大会にCat-Potの一員として出場することが決まりました!!!!
いきさつを以下にかきます
先々週RCJの北信越ブロック大会が開催されました.今年の出場チーム数は6チームでしたので,
3チームごとのリーグを行いその後一位から4位まで決めるといった流れで大会が進行されました.
Cat-Potが試合を行うリーグの相手は inputと長野高専のチームでした.
前日にやっとロボットが2体完成して,ふぅっと息つく間もなく新しいロボットが壊れてしまって,
初戦inputとの試合は1台で戦いました.もともと彼らが強いのと,こちらが一台というのもあり,一試合目は圧倒的に負けてしまいました.
落胆の中,調整の合間に二体目を弄っていたら基板の故障かと思っていたのがただの配線の接触不良ということに気付きました.そして二体目を試合直後に修理して,なんとか2試合目に参加,苦しいながらも勝利してリーグ2位になりました.
その後,ご飯をはさんで3試合目,3位決定戦が行われました.
休憩の間にプログラムを調整して多少まともに動くようにして迎えた3試合目,
低速ですが,確実に点を稼ぎ,相手に2倍の得点差で勝って辛くも3位入賞となりました.
ここまで,まさか3位になるとはって気分で終わりました.
大会後,例年だと出場枠が2枠なので,完全にロボカップ引退した気持ちでいました.
前日まで全く2台目動かなくて最下位候補だと思ってた僕からすれば3位はまずまずで,少し救われた気分だったので引退もいいかなとか.
ちょうど大会終わって一週間後テストだったので部活のことは一切触れずに過ごしてた今日まで.
そんなときにオカダ氏からおめでとうとの連絡が.
たまたまその日だけツイッターとかメールとかまったく更新しなかったため,まさかのチームでもなんでもない人から全国出場通知を受ける意味不明な結末になってしまいました.おかだくんありがとう
通知を受けた後メンバーと相談して,全国出場しようってことになって.結果ロボカップ引退できませんでした.よかったね!!!
そんなん今にいたります.
これからロボットを急ピッチで調整します.現行モデルでは夢を見すぎている点がいくつもあって実現不可能なところがあるのでそこらへん省いていろいろやったり.
全国でみんなよろしくね!!!以上 いきさつでした.
最後にブロック大会までいろいろな人にお世話になりました.
一番はチームのメンバ.これからも頑張ろう!
ツイッター界隈の人に感謝です.
共同回路設計者のおかだくんには特大の感謝ですね.地区大会ではその回路まったく使わなかったけどな!!!!!
それじゃぁ全国まであと一か月,悔いのないようにがんばりましょう!
gnuplotを使ったグラフの描画
近年技術の発達とともに,オシロスコープにもいろいろな機能が追加されるようになってきています.
今回はそのCSVファイルからEPS画像を作成することが目的です.
csvファイルはexel等の表計算ソフトで読み込むことが出来,それを用いればグラフを作成することが出来ます.また,gnuplotと呼ばれるグラフ描画ソフトを用いることによりグラフを生成する方法もあります.
この2つのやり方について特徴を次の表にまとめます.
では,例をのせます.次のような5点の時間対振幅波形が格納されたdata.csvからグラフpr1を作成したい場合. 図より,各点における時間と振幅のグラフが作成できていることがわかります.また見た目も美しく仕上がっています.
このようにプログラムを用いれば簡単にepsファイルを作成することが出来ました.またgnuplotの長所も生かすことが出来たといえます.
gnuplotでは折れ線グラフのほかにも棒グラフや対数グラフ,3次元グラフなどいろいろなことが出来ます.gnuplotでTeXライフを楽しく過ごしましょう!
図より,各点における時間と振幅のグラフが作成できていることがわかります.また見た目も美しく仕上がっています.
このようにプログラムを用いれば簡単にepsファイルを作成することが出来ました.またgnuplotの長所も生かすことが出来たといえます.
gnuplotでは折れ線グラフのほかにも棒グラフや対数グラフ,3次元グラフなどいろいろなことが出来ます.gnuplotでTeXライフを楽しく過ごしましょう!
| 方法 | 特徴 | 長所 | 短所 |
| exelによるグラフ作成 | 簡単 | 波形の調整をしながらグラフを見ることが出来る | ファイルが増えてくるといちいち開くのが面倒になる |
| gnuplotによるグラフ作成 | 見栄えがよい | ギリシャ文字等も美しく表現できる | 作成するのにgpファイルが必要で,グラフごとにgpファイルを作成しなくてはならない |
時間がかかったり,gpファイルのような中間ファイルが増えてきてフォルダを圧迫するのではスマートでありません.
また,ファイルを増やさないために毎度gpファイルを書き換えるのならばそれこそ時間がかかってしまいます.
それでも,きれいにかつ短時間でグラフを生成したいような場合は必ずあります.
そこで,今回はC言語力を借りてこれを解決しようと思います.
具体的には,同じようなグラフいくつも作成するとき,グラフ名やX軸,Y軸の最大値,グラフの値のみを変化させてcsvから直接eps画像の生成を行います.
これからプログラムを紹介する前に,プログラムを走らせる前の前提条件を以下にまとます.
- bcc compilarなどのCプログラムをコンパイルする環境が整っていること
- gnuplotがPCに入っていてパスもとおっていること
- そもそもepsファイルが見れること.(gsview等のソフト)
- ある程度C言語の知識があること
C言語にはパイプと呼ばれる機能が存在します.これはCのプログラムが動作中にプログラム内で別のプログラムを呼び出す.といったものです.今回はこれを用いてcのプログラムが動作中にgnuplotを起動し,項目をfprintfによりgnuplotに直接入力して波形を出力させます.
では,プログラムを以下に示します.
プログラムの流れは以下の通り.
実行するときは csv2eps ???.csv nameと入力して実行します.???.csvには一列目に時間,二列目に振幅が格納されていて,データ同士がコンマ区切りの物を使います.nameにはグラフに付けたい名前等(出力されるepsファイルの名前)を入力します.
では,例をのせます.次のような5点の時間対振幅波形が格納されたdata.csvからグラフpr1を作成したい場合.
0,5 10,100 50,50 60,5 120,55コマンドラインでは次のように入力します.
csv2eps data.csv pr1実行すると次のようなeps画像が出力されます.
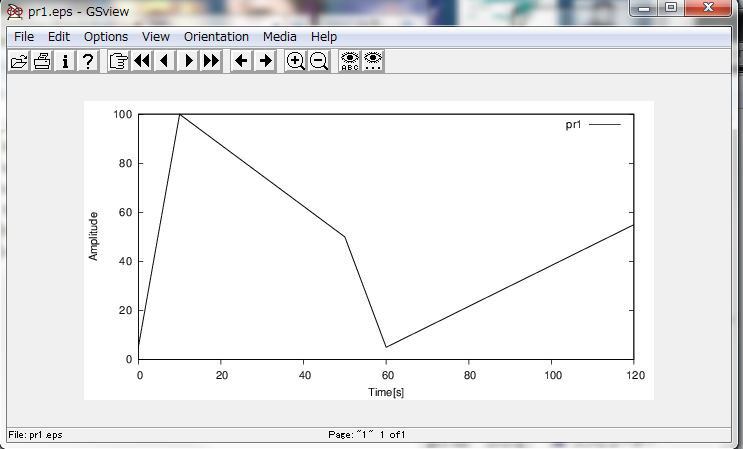 図より,各点における時間と振幅のグラフが作成できていることがわかります.また見た目も美しく仕上がっています.
このようにプログラムを用いれば簡単にepsファイルを作成することが出来ました.またgnuplotの長所も生かすことが出来たといえます.
gnuplotでは折れ線グラフのほかにも棒グラフや対数グラフ,3次元グラフなどいろいろなことが出来ます.gnuplotでTeXライフを楽しく過ごしましょう!
図より,各点における時間と振幅のグラフが作成できていることがわかります.また見た目も美しく仕上がっています.
このようにプログラムを用いれば簡単にepsファイルを作成することが出来ました.またgnuplotの長所も生かすことが出来たといえます.
gnuplotでは折れ線グラフのほかにも棒グラフや対数グラフ,3次元グラフなどいろいろなことが出来ます.gnuplotでTeXライフを楽しく過ごしましょう!
Cat-Pot(2年目)始動!
進捗どうですか??
すごく残念なんですが,NHK高専ロボコンでうちの高専は全国大会に行くことが叶いませんでした.
とてもいい出来だっただけに,惜しかったと思います.
部活の雰囲気も明るく,真面目に取り組んでいるので来年こそは全国大会に行って,
ロボットの掲げる目的を達成できるはずでしょう.
さて,言い方は悪いのですが,うちの高専ではNHK高専ロボコンが終わるとオフシーズンと呼ばれる期間に入ります.(僕はNHK高専ロボコン中もオフシーズンでした.
オフシーズン中は様々な大会に参加したり,新たな機構や回路を試して,NHK高専ロボコンにつなげる活動をしています.
ロボカップでも,昨年は機構的なチャレンジで,オムニホイールを使わない複雑な形の4輪のロボットを製作しました.勝つことはできませんでしたが,機構や,回路で学ぶことは多くありました.
大会を通していろいろな知識を学ぶことができ,交流によりまた知識を広げられるのはいいことですね.
前置きは以上で,ここからが本題です.
今年もオフシーズンが始まりました.
チームCat-Potは,今年も皆さんが驚くようなロボットを作っていきたいと思っています.
どうぞ今年もよろしくお願いします.